
Macht Appetit, oder?

Im Rahmen des Projektes Prototyping/Redesign konstruierten wir den Gartenroboter „Grobot“, eine Komplettlösung für die Automatisierung des Urban Farmings. Sein mechanischer Aufbau besteht aus einem Scherenarm, der in einer zentralen Säule gelagert ist, die sich um ihre eigene Achse dreht. So ist der Roboter trotz seiner kompakten Ausmaße in der Lage, ein Beet von etwa 9m² Fläche zu bewirtschaften.
Grobot misst in regelmäßigen Abständen die Bodenfeuchtigkeit bestimmter Sektionen des Beetes, und passt das Gießwasser an Faktoren wie die Trockenheit des Bodens, das zu erwartende Wetter und besondere Bedürfnisse der Pflanzen an. Über eine Kamera erkennt er Unkraut, indem er die Position von erkannten Pflanzen mit denen der Nutzpflanzen abgleicht, die in seiner Datenbank gespeichert sind. Darüber hinaus bildet Grobot eine Plattform, auf Grundlage derer die Umsetzung einer Vielzahl weiterer Funktionen wie Krankheitserkennung oder Schädlingsbekämpfung möglich ist.

Da es sich um ein Redesign handelte, orientierten wir uns an einem ähnlichen, bereits existierenden Produkt, dem Open Source Projekt „FarmBot“. Dieser Gartenroboter vollbringt mittels seiner austauschbaren Köpfe eine Vielzahl von Aufgaben, die weit über das Gießen und Unkraut jäten hinaus gehen. Dieser Kopf wird über ein System aus Schienen in Position gebracht, wodurch sich der Kopf in allen drei Raumachsen positionieren kann. Ähnliche Lösungen finden etwa auch in 3D-Druckern oder in CNC-Fräsen Anwendung, wo eine große Präzision unabdingbar ist.
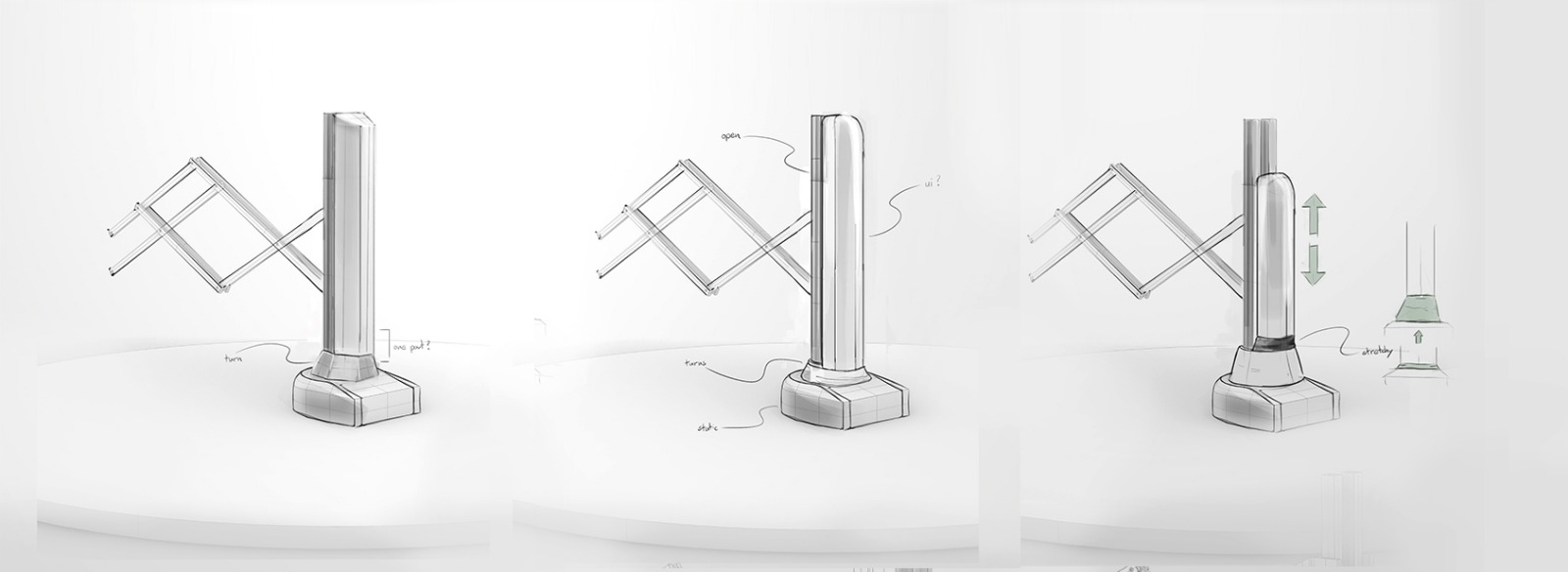
Wir sind der Meinung, dass das vielversprechende Konzept des FarmBots durch die verwendete Schienentechnik sein Potential verspielt. Wir wollen durch eine Reduktion technischer Komplexität den Nutzen des Farmbots beibehalten, aber seine Kosten senken und seine räumliche Präsenz im Garten dezenter gestalten. Nach einer Vielzahl verworfener Ideen erkannten wir, dass für die meisten Anwendungen keine Bewegungen in allen drei Achsen nötig sind.
Wenn wir von einer konstanten Höhe des Kopfes ausgingen, könnte die Beweglichkeit des Roboters auf zwei Freiheitsgrade verringert werden, und die Bewegung entlang dieser zwei Freiheitsgrade könnte ohne Weiteres durch einen zentralen, dreh- und ausfahrbaren Arm vollbracht werden.

Der Roboter wird von einem Arduino kontrolliert, der via Bluetooth mit einem Node.js Server verbunden ist. Dieser greift mittels Knext auf eine SQL-Datenbank zu, die die Informationen zur Darstellung des Feldes enthält. Diese wird dynamisch aus den Daten generiert.
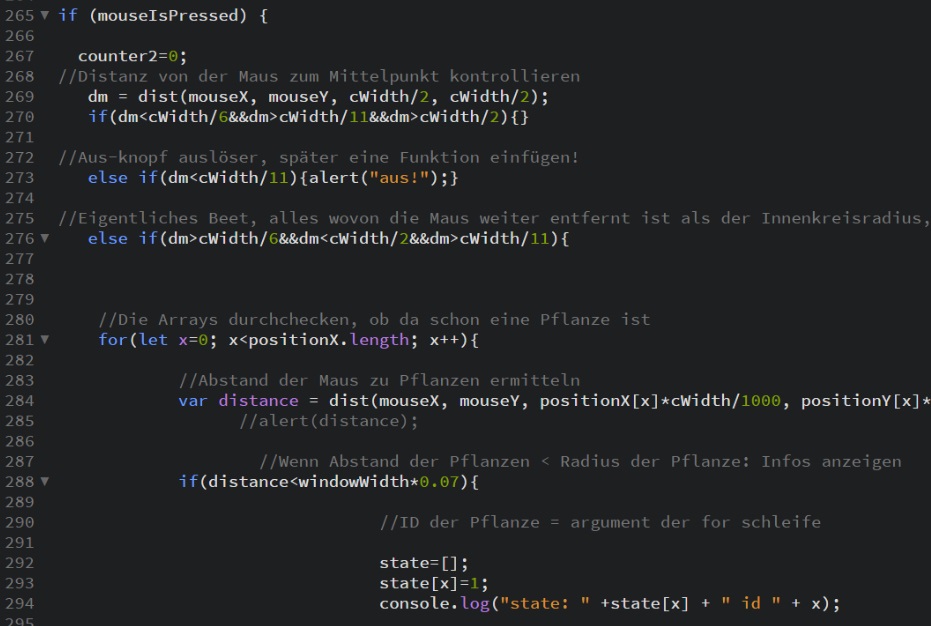
Die Datenbank beinhaltet unter anderem Informationen über die Position der Pflanzen in radialen Koordinaten. Diese werden für die Darstellung auf dem Frontend in karthesische Koordinaten umgewandelt.
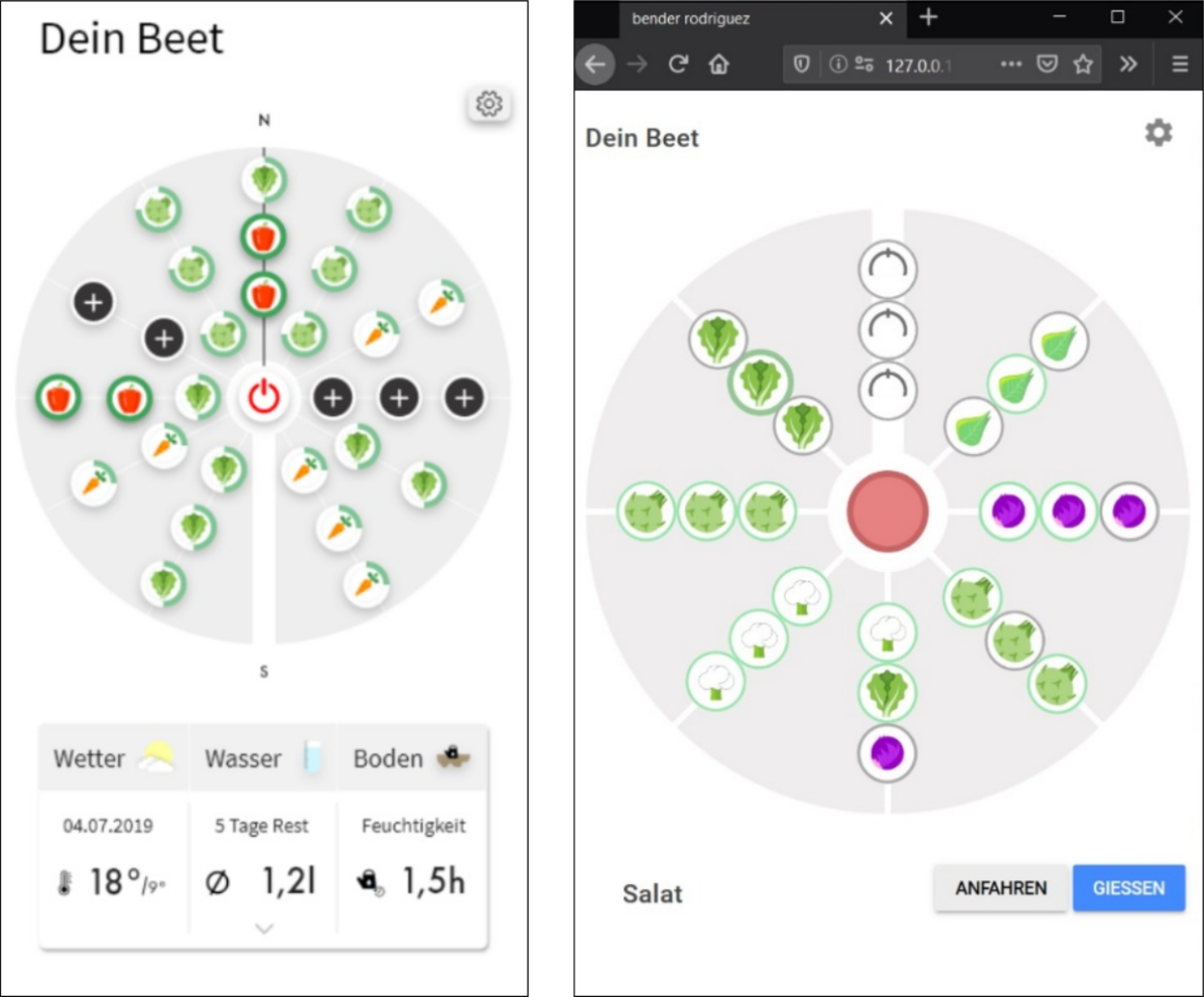
Das Frontend sollte eine grafische Wiedergabe des Beetes sein, das dem Nutzer einen klaren Überblick bietet. Der erste prototypische Ansatz (links) wurde letztendlich mit P5 umgesetzt (rechts).

Der letztendliche realisierte Prototyp war durch die Datenanbindung und das dynamisch generierte Frontend in der Lage, Pflanzen anzufahren und zu gießen. Er war als Exponat auf der Make Ostwürttemberg 2019 zu sehen, und wird von uns kontinuierlich verbessert und erweitert.
Die nächsten Schritte schließen eine Neuentwicklung der Software und eine Erweiterung des Funktionsumfanges entsprechend des Konzeptes ein.
